Crop Row Detection
Planting, fertilization, plant protection, weeding and harvesting are some of the processes in agricultural production that require high precision and repetition of the same action for several hours, which is very exhausting and demanding for humans. Automation of these processes is surely a very interesting problem, since it would make human labor less intensive and more precise leading to higher productivity. All the aforementioned processes require accurate machine guidance according to crop rows. The goal of this project is to develop an accurate crop row detection method which is: (i) highly insensitive to presence of weeds and shadow, (ii) capable of detecting crop rows of different crops, (iii) capable of detecting crop rows at different stages of growth, (iv) capable of detecting straight and curved crop rows and (v) insensitive to the number and spacing of crop rows.
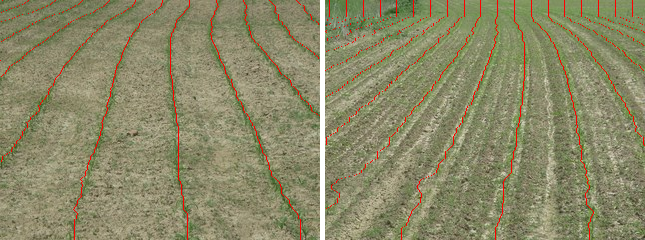
We propose an approach which combines image evidence and prior knowledge about the geometric structure which is searched in the image. The approach represents a pipeline consisting of three operations, (i) vegetation detection, (ii) detection of regular patterns and (iii) model fitting. The vegetation detection step is an image filtering procedure resulting in an intensity image, referred to in the following as vegetation image, where pixels corresponding to the vegetation regions in the original image have higher intensity value. This intensity value is computed according to the Excess Green color vegetation index. The obtained vegetation image is then processed by an algorithm for detection of regular patterns which characterize the appearance of crop rows. The crop model considered in the proposed approach is a sequence of crop parameter pairs, where each pair is assigned to an image row. These parameters are the distance between crop rows and the position of the central crop row relative to the image center. Each image row is matched with regular patterns corresponding to all combinations of the crop parameter pairs from a given range of discrete values. The obtained matching scores represent the basis for the model fitting step which searches for an optimal crop model, i.e. the optimal sequence of crop parameter pairs over all image rows. Two sample results are shown in the figure below, where detected crop rows are denoted by red color.
The proposed approach is presented in
Ivan Vidović, Robert Cupec, Željko Hocenski, Crop Row Detection by Global Energy Minimization, Pattern recognition. vol. 55 (2016) ; pp. 68-86.
We provide a benchmark dataset for evaluation of crop row detection methods.