Surface Descriptor Benchmark Dataset
We provide a benchmark dataset for evaluation of mobile robot localization approaches based on planar surface segments. This benchmark dataset enables researchers to evaluate:
• color/texture descriptors for planar surface segments,
• place recognition methods (topological localization),
• global localization (metric localization).
The dataset consists of the following components:
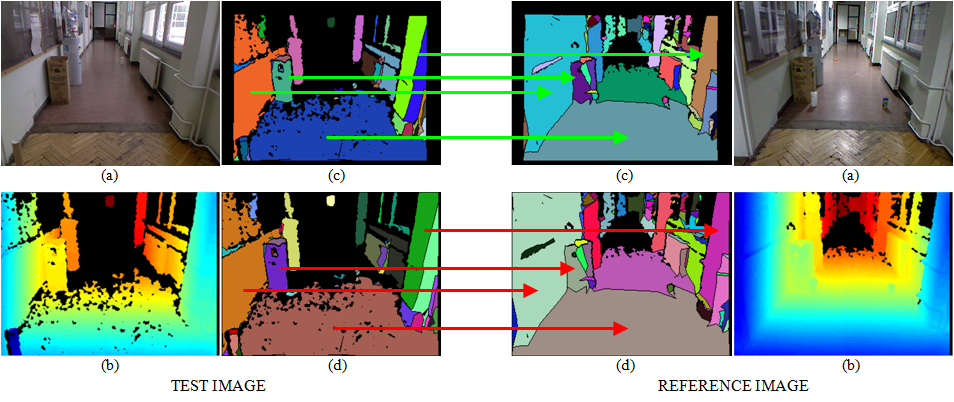
• test and reference sets of RGB-D scenes with segmentation maps and accompanying wheel odometry values,
• data file with correct relative 3DOF pose between corresponding test and reference scenes,
• data file with corresponding test and reference planar surface segments,
• kinect sensor calibration data.
The dataset is temporarily available here.